使用simulation进行装配体的结构分析(步骤10-19)
步骤10、划分网格:右击“网格”→“生成网格”→勾选“自动过渡” 步骤11、运行算例 步骤12、在SOLIDWORKS中切换到爆炸视图,通过该选项更加方便查看一些接触面的信息  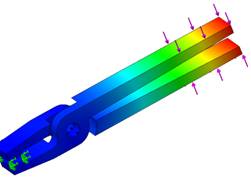 步骤13、定义合适的应力图解:完成分析之后软件会自动把结果值完全显示出来。如果需要定义某一最大值,观察模型是否有超过最大值。可通过调整“图表选项”修改。右击“应力1”→“图表选项”→“定义”(通过该选项定义图表的最大值和最小值,)最小为0最大2000psi。同时选择“显示最大值”
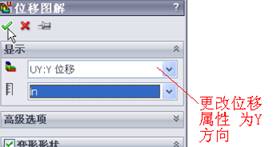
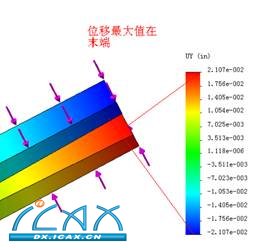
步骤14、创建位移图解,为了解Y方向的变形量,右击“位移1” →“编辑定义”选择UY作为位移变形量参考方向,定义1:1比例。 步骤15、研究当有足够大的力使得钳臂合在一起时,钳臂的应力值。根据前面的运算得到两臂距离减少0.021*2=0.042in,末端距离为0.6in,因此可得到要使得两臂末端合并添加作用力应为:50*0.6/0.042=715,就是说所添加的力要大于715lb
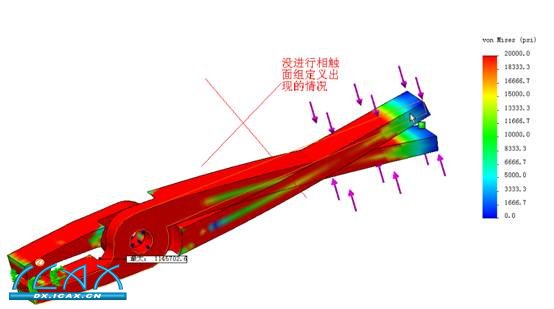
步骤16、创建能使得钳臂合并的算例:直接复制算例1,重命名算例2。为了确保钳臂能够合并,把作用力直接修改为2000lb。 步骤17、添加相触面组条件,在力的作用下上钳臂和下钳臂会产生相互穿透的结果,这个在真实中是不可能产生的,所以需要通过相关条件避免该情况。如果在作用力的方向上,上钳臂和下钳臂有接触面(因为全局接触只对接触面有效),可使用“全局接触”→“无穿透”条件;可本案例中,由于首先合并的端面初始状态不是接触的,因此定义全局接触条件不能防止穿透现象。在此情况下可定义局部接触条件防止穿透。全局接触与相触面组是有优先等级划分,顺序图如下
定义局部接触条件:右击“连接”→“相触面组”→选择虎钳臂末端的小分割面分别作为:源面和目标面。Ps:源面可以选择点、线、面,但是目标面不允许选择点、线。
选项的选择: 在定义相触面组时选项有三种选择:分别是节到节、节到曲面、曲面到曲面 节到节:此选项要求源面和目标面初始状态是接触的,在力的作用下,所选内容不能有相对滑移 节到曲面:不要求源面和目标面初始接触,允许所选内容有相对滑移。通常用于线面接触情况较多 曲面到曲到:源面和目标面都是选择面,同样不要求有初始接触的条件。但是此选项运算量较多。
在相触面组中:“曲面到曲面的【无穿透】”形式最为常用。
本算例中不考虑摩擦力, 步骤18、划分网格:使用默认网格并选择“自动过渡” 步骤19:运行算例:由于所添加的作用力使模型的变形量超过软件本身的小位移假设。在运行过程中会出现大位移警告窗口,点选否用小位移模式继续运算 总结:本课程对装配体进行分析,对于装配体分析,常常会对装配体进行简化,简化后使用接头和约束的功能模拟被简化的零件对装配体的影响。相互接触的零件可以进行全局的接触定义,同时为了防止零件相互交错,使用了“相触面组”条件处理。 |